Κινητό κάτοπτρο με μοτέρ actuator
Κατακτήστε τον ορίζοντα!

Featured | {p38}Η λύση στο απόλυτο zapping με κανάλια ανά τον κόσμο ακούει στο κινητό κάτοπτρο. Για να κατακτήσετε όμως τον ορίζοντα θα πρέπει να εγκαταστήσετε δορυφορική κεραία άνω των 1,2m, η οποία χρειάζεται για την κίνησή της μοτέρ τύπου actuator. Παρακάτω θα σας παρουσιάσουμε βήμα προς βήμα τη διαδικασία αυτή, ώστε να μάθετε όχι μόνο να τοποθετείτε μόνοι σας το κάτοπτρο, αλλά και να διορθώνετε τυχόν προβλήματα, αφού πλέον θα είστε γνώστες του όλου τρόπου λειτουργίας.
Η χρυσή τομή που ακούει στο 1,40m
Στην προσπάθειά μας να καλύψουμε όσο το δυνατόν περισσότερο αναγνωστικό κοινό με αυτό το άρθρο, επιλέξαμε να σας παρουσιάσουμε αναλυτικά τον τρόπο εγκατάστασης ενός κινητού κατόπτρου διαμέτρου 1,40m, η οποία είναι και η πιο χαρακτηριστική της αγοράς σε αυτά τα κάτοπτρα. Θα αναφερθούμε στις ιδιαιτερότητες που παρουσιάζει όσον αφορά τη συνδεσμολογία του, τις ρυθμίσεις του, αλλά και στις πιθανές δυσκολίες που μπορεί να αντιμετωπίσετε, καθιστώντας τη διαδικασία όσο το δυνατόν πιο εύκολη. Όλες οι φωτογραφίες έχουν παρθεί από κάτοπτρο Gibertini, το οποίο είναι ιδιαίτερα δημοφιλές στην ελληνική αγορά.
Στην προσπάθειά μας να καλύψουμε όσο το δυνατόν περισσότερο αναγνωστικό κοινό με αυτό το άρθρο, επιλέξαμε να σας παρουσιάσουμε αναλυτικά τον τρόπο εγκατάστασης ενός κινητού κατόπτρου διαμέτρου 1,40m, η οποία είναι και η πιο χαρακτηριστική της αγοράς σε αυτά τα κάτοπτρα. Θα αναφερθούμε στις ιδιαιτερότητες που παρουσιάζει όσον αφορά τη συνδεσμολογία του, τις ρυθμίσεις του, αλλά και στις πιθανές δυσκολίες που μπορεί να αντιμετωπίσετε, καθιστώντας τη διαδικασία όσο το δυνατόν πιο εύκολη. Όλες οι φωτογραφίες έχουν παρθεί από κάτοπτρο Gibertini, το οποίο είναι ιδιαίτερα δημοφιλές στην ελληνική αγορά.
Οι διαφορές με τα κινητά κάτοπτρα με μοτέρ DiSEqC
Ένα κινητό κάτοπτρο 1,40m, δύσκολα θα σας απογοητεύσει, όχι μόνο από θέμα λήψης (σαφώς έχουμε μεγαλύτερη απολαβή σήματος από ένα μικρότερο κάτοπτρο), αλλά και από θέμα σταθερότητας λειτουργίας, ιδιαίτερα κατά τη διάρκεια του χειμώνα, όπου επικρατούν δυνατοί βόρειοι άνεμοι στη χώρα μας.
Βάση εμπειρίας, σας αναφέρω ότι ένα κινητό κάτοπτρο 1.40m με μοτέρ τύπου actuator, εγκατεστημένο σωστά, είναι σπάνιο να χάσει τη στόχευση του τόξου των δορυφόρων λόγω δυνατού αέρα, σε σχέση πάντα με ένα κινητό κάτοπτρο 1,20 με μοτέρ DiSEqC, όπου το φαινόμενο είναι πιο σύνηθες. Αυτό οφείλεται στις κατασκευαστικές διαφορές που έχουν αυτά τα δύο κινητά κάτοπτρα και στον τρόπο στερέωσής τους, όπου τα μεγάλα κάτοπτρα υπερτερούν εμφανώς.
Μια άλλη διαφορά ενός κινητού κάτοπτρου με μοτέρ actuator (ξεκινούν συνήθως από 1,40m), σε σχέση με αυτά που λειτουργούν με DiSEqC 1.2 (μικρότερα από 1,20m), είναι ο βαθμός δυσκολίας κατά την εγκατάσταση. Όσο μεγαλύτερο είναι το κάτοπτρο, τόσο δυσκολότερη η εγκατάστασή του. Καταρχήν, τα μεγάλα κάτοπτρα απαρτίζονται από περισσότερα εξαρτήματα. Ο σημαντικότερος όμως λόγος είναι πως όσο πιο μεγάλο είναι ένα κάτοπτρο, τόσο πιο πολύ στενεύει ο λοβός λήψης του πολικού του διαγράμματος. Αυτό σημαίνει ότι κατά το κεντράρισμα ενός δορυφόρου μειώνονται τα περιθώρια λάθους, με αποτέλεσμα για τη λήψη του να απαιτεί σχεδόν τέλεια στόχευση.
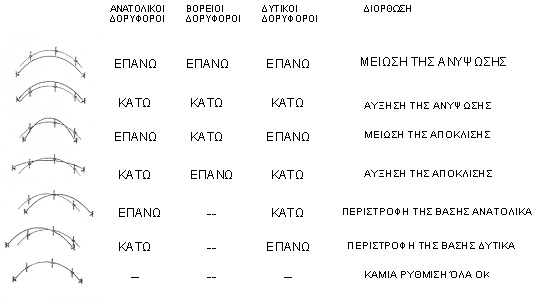
Εάν μάλιστα πρόκειται για κινητό, όπως στην περίπτωσή μας, τότε να ξέρετε πως θα πρέπει να βρείτε ακριβώς το νοητό τόξο των δορυφόρων κατά τη ρύθμισή του, ενώ η παραμικρή απόκλιση θα έχει σαν αποτέλεσμα την απώλεια σήματος και ποιότητας όλων των δορυφόρων (εικόνα 1).
Το polar mount
Ένα κάτοπτρο για να κινηθεί χρειάζεται τρία πράγματα, εκτός βέβαια από το δορυφορικό δέκτη. Το μοτέρ, την πολική βάση κίνησης (polar mount) και το σύστημα εντοπισμού θέσεων (positioner). Σε αντίθεση με τα μοτέρ τύπου DiSEqC 1.2, που περιέχουν όλα αυτά μαζί, σε ένα κινητό κάτοπτρο, είναι τρία διαφορετικά τμήματα.
Συνήθως διατίθεται μαζί με το κάτοπτρο, αλλά δεν είναι λίγοι εκείνοι που δοκιμάζουν την απόδοσή της στο δικό τους κάτοπτρο, ακόμη και αν προέρχεται από διαφορετικό κατασκευαστή, στην προσπάθειά τους να το μετατρέψουν από σταθερό σε κινητό. Μιλάμε φυσικά για τη βάση στήριξης του κατόπτρου, που αποτελεί το πρώτο σημαντικό μέρος του. Είναι σχεδιασμένη κατά τέτοιο τρόπο (εικόνα 2), ώστε να επιτρέπει στο κάτοπτρο όταν κινείται, να διαγράφει μια τοξοειδή τροχιά αντίστοιχη με αυτήν των δορυφόρων. Όπως καταλαβαίνετε, καθώς κινείται το κάτοπτρο δεν αλλάζει μόνο η θέση που στοχεύει, αλλά και το ύψος του.
Το actuator και η λειτουργία του
Το μοτέρ που χρησιμοποιείται στα μεγάλα κάτοπτρα είναι τύπου actuator. Στην αγορά υπάρχουν διάφοροι τύποι actuators, που διακρίνονται σύμφωνα με το μήκος τους και τη διάμετρό τους. Έτσι, έχουμε actuator μήκους 12, 18, 24 και 36 ιντσών, αλλά και τα normal και heavy actuators. Τα normal διατίθενται μόνο για τα μήκη των 12, 18 και 24 ιντσών, ενώ τα heavy διατίθενται μόνο για το μήκος των 36 ιντσών.
Το actuator συνδέεται ανάμεσα στο κινητό και σταθερό μέρος της πολικής βάσης στήριξης. Ο κινητήρας, που βρίσκεται στο κάτω μέρος συνεργάζεται με δύο μακρόστενους κυλίνδρους, εκ των οποίων ο ένας βρίσκεται εντός του άλλου (εικόνα 3). Ένα σύμπλεγμα γραναζιών επιτρέπει τη σύνδεση του μοτέρ με τον εσωτερικό κύλινδρο. Καθώς κινείται το μοτέρ, ο εσωτερικός κύλινδρος εξέρχεται ή εισέρχεται στον εξωτερικό, δημιουργώντας έτσι ένα μπράτσο μεταβλητού μήκους.
Ας δούμε όμως τον ακριβή τρόπο λειτουργίας του μοτέρ. Όταν δίνουμε εντολή στο μοτέρ να κινηθεί, τότε αυτό μετακινεί τα γρανάζια που είναι συνδεδεμένα μαζί του, με αποτέλεσμα ο εσωτερικός κύλινδρος να περιστρέφεται ατέρμονα. Με δεδομένο ότι η θέση του, σε σχέση με το υπόλοιπο σκάφος είναι σταθερή, έχουμε σαν αποτέλεσμα την εκτόνωση της κίνησης αυτής, με τη μετακίνηση του δευτέρου κυλίνδρου προς τα εμπρός (ή προς τα πίσω αν το μοτέρ κινηθεί με ανάστροφη φορά).
Με αυτόν τον τρόπο επιτυγχάνεται η αυξομείωση του μεγέθους του μπράτσου του actuator, η οποία σε συνδυασμό με τον τρόπο στερέωσής του στη βάση polar mount (συνδέεται ανάμεσα στο κινητό και σταθερό μέρος της), επιτρέπει τη μετακίνηση της βάσης polar και κατ’ επέκταση του κατόπτρου.
(εικόνα 4).
Η σύνδεση του positioner
Το positioner ή σύστημα εντοπισμού θέσεων (εικόνα 5) είναι μία συσκευή, που συνήθως τοποθετείται δίπλα στο δέκτη και όταν υποστηρίζει το πρωτόκολλο DiSEqC 1.2 συνδέεται με αυτόν και ονομάζεται V-box (εικόνα 6). Ο ρόλος του είναι διπλός, αφού χρησιμεύει αφενός για να τροφοδοτήσει το μοτέρ actuator, αλλά και για να αποθηκεύσει τις θέσεις των δορυφόρων, ώστε ο τηλεθεατής να μπορεί να τις βρει εύκολα όποτε θελήσει.
Με δεδομένο ότι αναλαμβάνει να τροφοδοτήσει το μοτέρ, στο πίσω μέρος του θα βρείτε τέσσερις επαφές με κλιπ, τις οποίες θα συνδέσετε με το μοτέρ. Αν τώρα το positioner είναι τύπου V-box, θα διαθέτει και είσοδο και έξοδο IF, ώστε να συνδεθεί ανάμεσα σε LNB και δορυφορικό δέκτη.
Το καλώδιο σύνδεσης με το μοτέρ θα πρέπει να είναι τετράκλωνο, δηλαδή να περιέχει στο εσωτερικό του τέσσερα μικρότερα καλώδια διαφορετικού χρώματος. Φυσικά, μπορεί να χρησιμοποιηθεί και πολύκλωνο καλώδιο, μόνο στους τέσσερις κλώνους.
Όταν οι αποστάσεις είναι μεγάλες και ειδικά στην περίπτωση που χρησιμοποιείται heavy actuator, προτείνουμε ειδικό καλώδιο διατομής 0,50mm για τους κλώνους που μεταφέρουν την τάση και 0,25mm, για τους κλώνους που μεταφέρουν την εντολή κίνησης. Οι επαφές που μεταφέρουν την τάση τροφοδοσίας των 36V, αναγράφουν Μ1, Μ2 ή απλά Motor και πρέπει να συνδεθούν στις αντίστοιχες επαφές του μοτέρ. Οι άλλες δύο επαφές αναγράφουν την ένδειξη sensor και είναι υπεύθυνες για τη μεταφορά της εντολής που καθορίζει το μέγεθος της κίνησης του μοτέρ, που στην πράξη σημαίνει το τόξο που θα διανύσει το κάτοπτρο, για να μεταφερθεί στο σημείο (ή δορυφόρο) που επιθυμείτε.
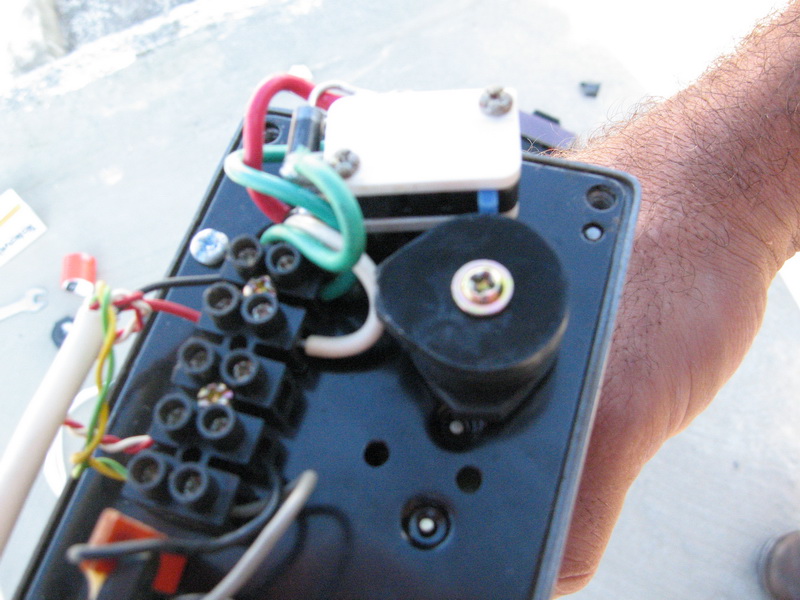
Προσέξτε ώστε οι επαφές που αναγράφουν την ένδειξη motor στο positioner, να συνδέονται με τις αντίστοιχες επαφές στο μοτέρ και όχι με αυτές του σένσορα. Σημειώστε σε ένα χαρτάκι την αντιστοιχία των χρωματικών καλωδίων με τις επαφές του μοτέρ (εικόνα 7), ώστε να χρησιμοποιήσετε την ίδια κατά τη σύνδεση με το positioner. Σε αντίθετη περίπτωση θα προκαλέσετε βλάβη στο σένσορα και δυσλειτουργία στο μοτέρ.
Η αρχή λειτουργίας του positioner
Στο κάτω και πίσω μέρος του actuator βρίσκεται ένας μικρός τροχός, ο οποίος είναι άμεσα συνδεδεμένος με τον εσωτερικό κύλινδρο, που κινείται ανάλογα με την κίνηση του μοτέρ. Περιμετρικά και πάνω στον τροχό, είναι τοποθετημένες μαγνητικές επαφές που περιστρέφονται μαζί του, σε κάθε περιστροφή του κυλίνδρου.
Όταν το μοτέρ κινείται, ο τροχός με τις μαγνητικές επαφές περιστρέφεται. Κάθε φορά που μια μαγνητική επαφή περνά από τον αισθητήρα (reed sensor), δημιουργείται επαγωγικό ρεύμα, με αποτέλεσμα να άγει, δηλαδή παρουσιάζει επαγωγικό ρεύμα. Αντίθετα, όταν δεν βρίσκεται μαγνητική επαφή πάνω από τον reed sensor, αυτός δεν άγει, οπότε δεν υπάρχει ρεύμα. Με αυτόν τον τρόπο δημιουργούνται παλμοί ρεύματος. Οι παλμοί αυτοί προσμετρούνται και επεξεργάζονται από το positioner, αφού είναι συνδεδεμένο με τον αισθητήρα.
Το positioner γνωρίζει εκ των προτέρων πόσους παλμούς θα πρέπει να δεχτεί, ώστε να μετακινήσει το κάτοπτρο στη θέση μνήμης που ζητάμε. Έτσι, μόλις φτάσει και ο τελευταίος παλμός που περιμένει, διακόπτει την τάση των 36Volt που οδηγούν το μοτέρ κίνησης. Έτσι, το κάτοπτρο ακινητοποιείται στη θέση που ζητήσαμε.
Όπως καταλαβαίνετε, ένα καλό μοτέρ ξεχωρίζει από το πόσες μαγνητικές επαφές διαθέτει ο τροχός. Όσο περισσότερες είναι, τόσο συχνότερα θα στέλνονται παλμοί στο positioner και άρα τόσο ακριβέστερη θα είναι η κίνηση και η τελική θέση του κατόπτρου.
Επιλογή και χρήση positioner
Τα πρώτα positioners που έπεσαν στην αντίληψή μου, είχαν μόνο δύο εισόδους καλωδίων, δηλαδή έστελναν μόνο 36Volt. Δε διέθεταν τηλεχειριστήριο ούτε δυνατότητα αποθήκευσης θέσεων, αλλά μόνο δύο διακόπτες, που ανάλογα ποιον θα πατούσαμε, αντιστρεφόταν η τάση πόλωσης (+36V ή -36V) που λάμβανε το μοτέρ, με αποτέλεσμα να είναι εφικτή η κίνηση προς τη μια ή την άλλη κατεύθυνση. Παρότι αποτελούν πλέον μουσειακό είδος, κρατάω ακόμη ένα, διότι με βοηθάει στον τελικό έλεγχο της κίνησης ενός κατόπτρου κατά την εγκατάσταση, χωρίς να συνδέω πολλά καλώδια.
Τα positioners που κυκλοφορούν σήμερα στην αγορά έχουν πλέον πληθώρα μνημών, τηλεχειρισμό, πλήκτρα έλεγχου και κάποια από αυτά υποστηρίζουν το πρωτόκολλο DiSEqC 1.2. Προτιμήστε κάτι που να τα ενσωματώνει όλα, δηλαδή ένα V-box, καθώς η μετακίνηση του κατόπτρου επιτυγχάνεται ευκολότερα.
Συγκεκριμένα, με τα απλά positioner η μετακίνηση του κατόπτρου επιτυγχάνεται πανεύκολα με το τηλεχειριστήριο. Πατήστε τον αριθμό μνήμης που έχετε αντιστοιχίσει στο δορυφόρο (π.χ. πλήκτρο 1 για Hot Bird, 2 για Astra) και το κάτοπτρο θα γυρίσει αμέσως σε αυτόν.
Ακόμη πιο εύκολη όμως είναι η μετακίνηση κατόπτρου με τα V-box, καθώς δεν χρειάζεται να πατήσετε κανένα πλήκτρο στο τηλεχειριστήριο του positioner, αφού η μετακίνηση επιτυγχάνεται αυτόματα, κάθε φορά που αλλάζετε κανάλι.
Για να γίνει αυτό, το μόνο πρέπει να κάνουμε είναι να δηλώσουμε στο δέκτη κινητό κάτοπτρο με μοτέρ DiSEqC 1.2 (άσχετα αν εμείς έχουμε actuator). Έτσι, κάθε φορά που επιλέγουμε κανάλι, ο δέκτης στέλνει ένα σετ εντολών εντολή DiSEqC 1.2, που θα μετακινούσαν το κάτοπτρο στο σωστό δορυφόρο, αν είχαμε ένα μοτέρ DiSEqC 1.2. Το V-box, έρχεται να κάνει ακριβώς αυτή τη λειτουργία. Παρεμβάλλεται ανάμεσα στο LNB και το δέκτη και αναλαμβάνει να μετατρέψει την εντολή DiSEqC 1.2 σε εντολή actuator.
Βέβαια, τα πράγματα δεν είναι και τόσο ρόδινα στην πράξη, αφού πολλές φορές μπορεί να μη λειτουργεί σωστά η λειτουργία με DiSEqC 1.2, οπότε θα χρειαστεί να γυρίσετε στον πατροπαράδοτο, αλλά σίγουρο πάντα τρόπο. Πάντως, τα V-box υποστηρίζουν και τις δύο περιπτώσεις.
Μία από αυτές τις περιπτώσεις είναι η κίνηση μέσω DiSEqC 1.2, με δέκτες που διαθέτουν ανεπίσημο λογισμικό (είναι κοινώς πατσαρισμένοι). Οι δέκτες αυτοί πολλές φορές δεν λειτουργούν σωστά την κίνηση με DiSEqC 1.2, με αποτέλεσμα να χάνετε τις μνήμες, να παρκάρει το κάτοπτρο στην άκρη του τόξου και πολλά ακόμη. Μέχρι να βγει λογισμικό που διορθώνει τα προβλήματα, καλό είναι να χρησιμοποιήσετε το V-box σαν παραδοσιακό positioner. Το μόνο που πρέπει να κάνετε είναι να το αποσυνδέσετε από δέκτη και LNB.
Επίσης, αξίζει να αναφέρουμε ότι στο παρελθόν είχαν κυκλοφορήσει κάποια πολύ αξιόλογα μοντέλα δορυφορικών δεκτών με ενσωματωμένο positioner (με μερικά από αυτά να υποστηρίζουν και μηχανικό polar rotor, ο οποίος φροντίζει για την περιστροφή του LNB). Σήμερα όμως, η εντολή DiSEqC 1.2 φαίνεται να έχει επικρατήσει και τα μοντέλα αυτά έχουν σχεδόν εξαφανιστεί από την αγορά. Παρόλα αυτά, αν διαθέτετε ένα τέτοιο δέκτη μπορείτε να τον αξιοποιήσετε, σε αντίθετη περίπτωση θα πρέπει να προμηθευτείτε ξεχωριστό positioner.
H εγκατάσταση βήμα προς βήμα
Μετά από αρκετή, αλλά απαραίτητη κατά τη γνώμη μας θεωρία, που σας βοηθάει να καταλάβετε πώς λειτουργεί η όλη διαδικασία κίνησης, είναι καιρός να περιγράψουμε την εγκατάσταση.
Καταρχήν πρέπει να γνωρίζετε ότι οι δορυφόροι είναι ακίνητοι σε σχέση με το σημείο λήψης και σχηματίζουν ένα τόξο στον ορίζοντα, ανατολικά και δυτικά του πραγματικού νότου. Αυτό το τόξο καλούμαστε να στοχεύσουμε με το κινητό μας κάτοπτρο.
Επιβεβαιώνουμε ότι δεν υπάρχουν φυσικά εμπόδια στον ορίζοντά μας και ξεκινάμε με τη στερέωση της βάσης του κάτοπτρου. Η στερέωση πρέπει να γίνει με μεγάλη προσοχή, καθώς τα κινητά κάτοπτρα της τάξης των 1,40m και άνω είναι ογκώδη και βαριά. Για αυτό αποφεύγετε την εγκατάσταση σε κάγκελα ταράτσας ή μπαλκονιού, όπως και γωνιακές βάσεις τοίχου ή σωληνωτές βάσεις, οι οποίες στηρίζονται σε τοιχία από τούβλα.
Η εγκατάσταση θα πρέπει να γίνεται αυστηρά σε βάση δαπέδου, με διάμετρο Φ78 (περίπου) και με σιδερένιες αντηρίδες ή κατ’ εξαίρεση σε σωληνωτή πλαϊνή βάση τοιχίου από τσιμέντο, στερεωμένη με μεταλλικά ούπα. Μη δοκιμάσετε κάποιες έτοιμες βάσεις που αφήνουν οι κατασκευαστές σε κατοικίες με κεραμοσκεπές (με πρόβλεψη δορυφορικής κεραίας), καθώς το χειμώνα μάλλον θα απογοητευτείτε.
Εάν η βάση σας διαθέτει τρεις μεταλλικές αντηρίδες, τότε φροντίστε η μπροστινή αντηρίδα να σημαδεύει το νότο, οπότε οι άλλες δύο θα βρίσκονται προς το βορρά. Μόνο έτσι θα είσαστε σίγουροι ότι το κάτοπτρο δεν θα προσκρούσει σε μία από τις δύο αντηρίδες, πριν ολοκληρώσει την κίνησή του, κάτι που σημαίνει αδυναμία κάλυψης όλου του δορυφορικού τόξου.
Μεγάλη προσοχή πρέπει να δώσετε και στο αλφάδιασμα της βάσης. Επειδή το κάτοπτρο είναι αρκετά μεγάλο, δεν αρκεί ένα απλό αλφάδιασμα, καθώς στην περίπτωση αυτή επιζητούμε το τέλειο. Με το αλφάδι πάνω στη βάση, ψάχνουμε για ένα σημείο της ταράτσας που να έχει μηδενική ή τη λιγότερη δυνατή κλίση. Στη συνέχεια σημειώνουμε τα σημεία που θα γίνουν οι τρύπες της βάσης (εικόνα 8).
Αφού κάνουμε τις τρύπες για τα μεταλλικά ούπα, τοποθετούμε απαραίτητα μονωτικό υλικό, κατά της υγρασίας. Στη συνέχεια βιδώνουμε σταυρωτά τα μεταλλικά ούπα, ενώ παράλληλα συμβουλευόμαστε και το αλφάδι, τοποθετώντας το διαδοχικά τόσο μπροστά, όσο και στο πλάι (εικόνες 9 και 10). Όπως θα παρατηρήσετε και μόνοι σας, κάθε βίδα που σφίγγουμε αλλάζει και λίγο την κλίση της βάσης, για αυτό θα πρέπει να παρακολουθείτε συνεχώς το αλφάδι και να βιδώνετε διορθώνοντας συνεχώς την κλίση. Σταματήστε το σφίξιμο, μόνο όταν είστε σίγουροι ότι η βάση είναι απολύτως κάθετη.
Μετά ακολουθούν οι σιδερένιες αντηρίδες. Σημαδεύετε στο δάπεδο για να τρυπήσετε και στη συνέχεια τοποθετήστε τα μεταλλικά ούπα των αντηρίδων. Προσέξτε μη χαλάσετε το αλφάδιασμα της κυρίως βάσης, ενώ αποφεύγουμε να συμβουλευόμαστε το αλφάδι σε οριζόντια θέση (εικόνα 11).
Βεβαιωθείτε ότι η βάση έχει τάπα στο άνω μέρος (εικόνα 12). Συναρμολογήστε τη βάση κίνησης του κατόπτρου polar mount και τοποθετήστε τη επάνω στη βάση δαπέδου (εικόνα 13). Κατά την τοποθέτηση, φροντίστε το polar mount να είναι στραμμένο προς το νότο (εικόνα 14). Σφίξτε ελαφρά και πάντα σταυρωτά τις βίδες του polar mount (εικόνες 15 και 16), ώστε να μη μετακινείται εύκολα από τη θέση του, αλλά και να μπορούμε να προβούμε αργότερα σε διορθωτικές κινήσεις.
Σφίξτε προσωρινά τον κεντρικό πύρο, για να μην περιστρέφεται (εικόνες 17 και 18), αφού βέβαια το ρυθμίσετε ώστε να βρίσκεται στο σημείο μηδέν (εικόνα 19).
Στη συνέχεια ακολουθεί η συναρμολόγηση του κατόπτρου και η στερέωσή του πάνω στο polar-mount (εικόνα 20). Τοποθετήστε τις βίδες σύσφιξης και σφίξτε τις μόνιμα (εικόνα 21 και 22), αφού πρώτα τις ρυθμίσετε σύμφωνα με το γεωγραφικό πλάτος της περιοχής σας (38 μοίρες για Αθήνα και 40,6 για Θεσσαλονίκη) (εικόνα 23). Αν δεν γνωρίζετε το γεωγραφικό πλάτος, συμβουλευτείτε τους πίνακες του περιοδικού ή την ιστοσελίδα satsig.net. Έπειτα, ρυθμίστε την ανύψωση του κατόπτρου, που για το κάτοπτρο των εικόνων (Gibertini), πρέπει να είναι στη θέση μηδέν (εικόνα 24).
Για να βρούμε τον πραγματικό νότο, αρκεί να στοχεύσουμε τον δορυφόρο Astra 3A/3B στις 23,5 μοίρες, ο οποίος είναι εφικτός σε ορισμένες συχνότητες, σε ορισμένες περιοχές (όπως στην Αθήνα) τις οποίες μπορείτε να βρείτε στους πίνακες του Digital TV. Κλειδώνοντας σε αυτόν τον δορυφόρο βρισκόμαστε στον πραγματικό νότο, κάνοντας πολύ ευκολότερη τη διαδικασία ρύθμισης του κινητού κατόπτρου. Σε περιοχές όπου δεν μπορεί να γίνει λήψη του Astra 3A/3B προχωράτε με την παρακάτω διαδικασία.
Κάνοντας μικρές διορθωτικές κινήσεις, στρίβοντας ολόκληρο το polar mount (παραμένει μόνιμα με μηδέν κλίση) (εικόνα 25), θα πρέπει κάποια στιγμή να βρείτε τον Arabsat, που είναι ο πλησιέστερος δορυφόρος στο νότο, για την περιοχή της Αθήνας και έχει εύκολη λήψη (εικόνα 26). Κάνοντας μικρομετρικές ρυθμίσεις (συνήθως σφίγγοντας παραπάνω κάποιας βίδες) χωρίς να πειράξουμε τις βασικές, φέρνουμε το μέγιστο σήμα.
Στη συνέχεια μετακινούμε το polar mount 2,5 μοίρες δεξιά, έτσι ώστε μόλις να χάνεται το σήμα του δορυφόρου Arabsat (εικόνα 27). Εκεί βρίσκεται ο πραγματικός νότος. Χαλαρώστε το παξιμάδι του κεντρικού πύρου του polar mount που το κρατά ακίνητο και μετακινήστε το κάτοπτρο χειροκίνητα, ώστε να ελέγξετε το σήμα του κάθε δορυφόρου ξεχωριστά (εικόνα 28). Εάν δεν κατεβάζετε όλο το τόξο, μην απογοητεύεστε. Δοκιμάστε ξανακάνοντας τα προηγούμενα βήματα.
Τοποθετήστε το actuator στο κάτοπτρο (εικόνα 29), δίνοντας ιδιαίτερη προσοχή στη φορά κουτιού, που βρίσκεται το μοτέρ (εικόνα 30). Το σημείο που βγαίνει το καλώδιο πρέπει να είναι από κάτω, για να μην εισρέει βρόχινο νερό το χειμώνα (εικόνα 31).
Στη συνέχεια, σφίγγουμε τις βίδες του actuator πάνω και κάτω (εικόνες 32 και 33). Ανεβάζουμε ένα positioner στην ταράτσα και το συνδέουμε μέσω του τετράκλωνου καλωδίου του μοτέρ που προορίζεται για το δωμάτιό μας (εικόνα 34). Συνδέουμε τα καλώδια σ’ αυτό, όπως εξηγήσαμε σε προηγούμενη παράγραφο. Δώστε προσοχή στα χρώματα, αλλά και στο ζεύγος που θα συνδέσετε με το σένσορα (εικόνα 35). Ο διακόπτης μηχανικού ορίου του μοτέρ θα ρυθμιστεί στο τέλος (εικόνα 36).
Γυρίζουμε ηλεκτρομηχανικά πλέον το κάτοπτρο και περνούμε και πάλι μετρήσεις από κάθε δορυφόρο (εικόνα 37). Εάν δίνετε εντολή στο positioner να κινηθεί ανατολικά κι αυτό ταξιδεύει προς τη δύση (!), τότε αντιστρέψτε τη φορά των καλωδίων που τροφοδοτούν το μοτέρ.
Αυτός ο τελικός έλεγχος είναι απαραίτητος και να μην τον παραλείπετε ποτέ, καθώς το σύστημά μας είναι πλέον επιφορτισμένο και με το βάρος του actuator. Αν παρατηρήσετε διαφορές, ρυθμίζετε ξανά μικρομετρικά. Όπως θα δείτε και μόνοι σας, το απλό σφίξιμο μιας βίδας του polar mount με μισή στροφή, αλλάζει τα δεδομένα στην ψηφιακή σας μέτρηση!
Τελειώνοντας, να ξέρετε πως μπορείτε να τοποθετήσετε μηχανικά όρια στην κίνηση του μοτέρ (ρυθμίζοντας τη ροδέλα στην εικόνα 36) ή να τοποθετήσετε ηλεκτρονικά όρια στο positioner (συμβουλευτείτε τις οδηγίες χρήσης του).