Η λειτουργία του Μοτέρ Actuator & Positioner
…και οι λύσεις στα προβλήματά τους.

Featured | Η κίνηση ενός κάτοπτρου με μοτέρ τύπου actuator, καθώς και η δυνατότητά του να σταματάει σε προκαθορισμένα σημεία που αντιστοιχούν σε θέσεις δορυφόρων (ανάλογα με το κανάλι που θα επιλέξουμε) πραγματοποιείται με τη συνεργασία ηλεκτρομηχανικών κυκλωμάτων, καθώς και με μια σειρά εντολών που μεταδίδονται μεταξύ αυτών. Σκοπός αυτού του άρθρου είναι η ανάλυση της αρχής λειτουργίας των εμπλεκομένων συσκευών μοτέρ actuator και positioner, καθώς και της συνεργασίας τους με το δορυφορικό δέκτη στην περίπτωση κίνησης, μέσω του πρωτοκόλλου DiSEqC 1.2.
Η αρχή λειτουργίας του μοτέρ Actuator
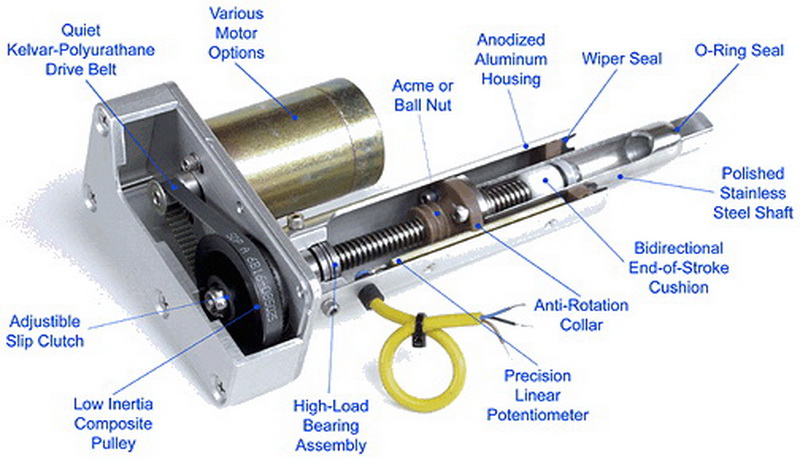
To μοτέρ τύπου actuator έχει σαν βασική αρχή τη μετατροπή της περιστροφικής κίνησης σε γραμμική κίνηση. Η κίνηση προκαλείται από το μοτέρ και επιτυγχάνεται με την περιστροφική κίνηση ενός συμπλέγματος γραναζιών σε έναν κύλινδρο, που βρίσκεται μέσα σε έναν άλλον κύλινδρο. Οι δύο κύλινδροι συνδέονται μεταξύ τους σπειρωματικά.
Η εκτόνωση της περιστροφικής κίνησης του ενός μέσα στον άλλον, έχει ως αποτέλεσμα την επιμήκυνση του συμπλέγματος των δύο κυλίνδρων, άρα έχουμε γραμμική κίνηση σε αύξοντα βαθμό.
Με αντίθετη κίνηση του μοτέρ έχουμε το αντίστροφο αποτέλεσμα, δηλαδή ελάττωση του συνολικού μήκους του συμπλέγματος.
Η γραμμική αύξηση ή ελάττωση του τηλεσκοπικού σκάφους των δύο κυλίνδρων, σε συνδυασμό με τη στερέωσή τους στην πολική βάση του κατόπτρου (polar mount), έχει ως αποτέλεσμα τη μετακίνηση του κατόπτρου πάνω στο τόξο των δορυφόρων.
Η κίνηση του μοτέρ προς τη μία ή την άλλη κατεύθυνση (άρα και κατ’ επέκταση, η κίνηση του κατόπτρου ανατολικά ή δυτικά) επιτυγχάνεται με την εφαρμογή μιας τάσης 36V στα άκρα του.
H συσκευή που παρέχει αυτήν την τάση ονομάζεται Positioner. Αναστροφή της πολικότητας της συγκεκριμένης τάσης, προκαλεί κίνηση προς την αντίθετη κατεύθυνση.
Πέραν από την απλή κίνηση του μοτέρ προς τη μία ή την άλλη κατεύθυνση, υπάρχει η ανάγκη ελεγχόμενης κίνησης του κεραιοσυστήματος σε προκαθορισμένα σημεία, που αντιστοιχούν σε θέσεις δορυφόρων. Αυτό επιτυγχάνεται με την παραγωγή παλμών επιστροφής, που δημιουργούνται με την ταυτόχρονη κίνηση του μοτέρ και αναγνωρίζονται από όλα τα σύγχρονα positioner.
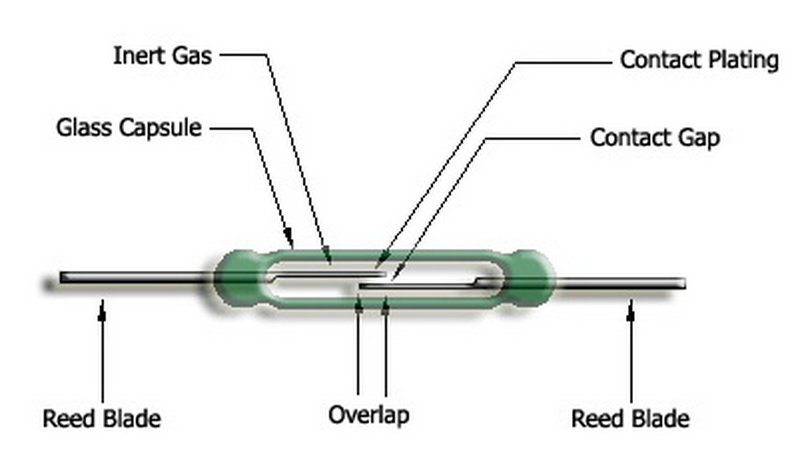
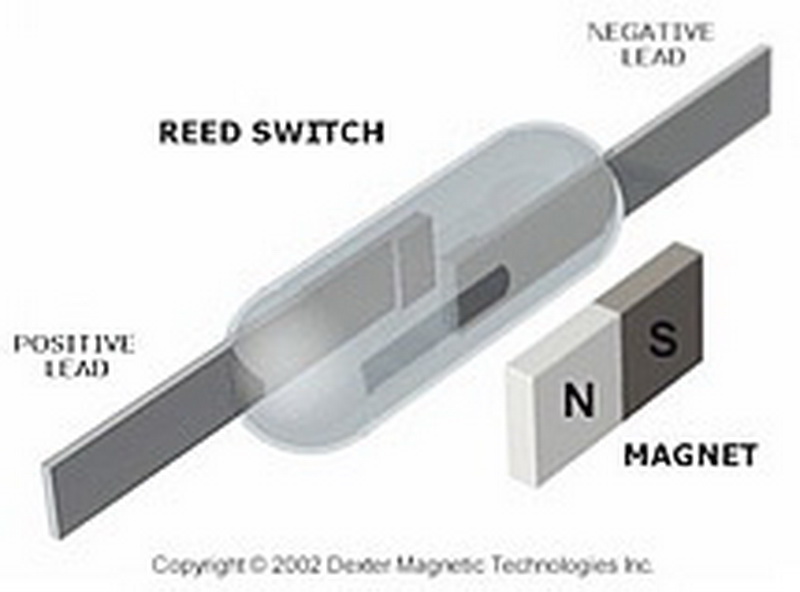
Καθώς το μοτέρ κινείται, έχουμε ταυτόχρονη περιστροφή και μιας ροδέλας στο κάτω μέρος του σταθερού σκάφους του actuator. Πάνω σε αυτήν, περιμετρικά, είναι τοποθετημένοι ανά τακτά διαστήματα μικροσκοπικοί μαγνήτες. Πολύ κοντά στην περίμετρο της ροδέλας, βρίσκεται μια μαγνητική επαφή που παρουσιάζει την εξής ιδιότητα.
Σε κατάσταση ηρεμίας, η μαγνητική επαφή είναι ανοικτή και δεν κλείνει κύκλωμα – και άρα δεν διέρχεται ρεύμα στο εσωτερικό της. Όταν όμως στα άκρα της τοποθετηθεί ένας μαγνήτης, αυτή έλκεται από το μαγνήτη, με αποτέλεσμα να έρθει σε επαφή με το άλλο άκρο της γραμμής, ώστε το κύκλωμα να κλείσει και να διέλθει ρεύμα στο εσωτερικό της. Όλο αυτό το μαγνητικό – μηχανικό σύστημα ονομάζεται Reed Sensor.
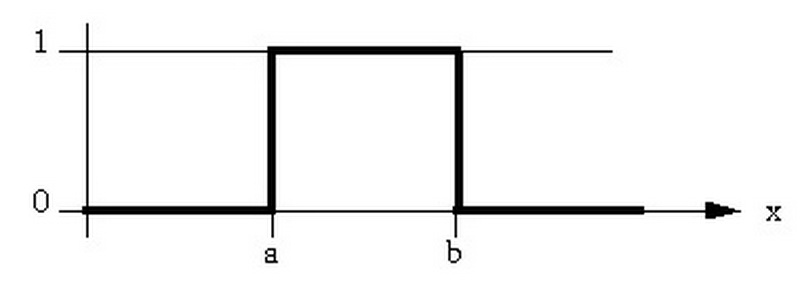
Εάν τώρα στα άκρα του Reed Sensor εφαρμοστεί μια συνεχής τάση, καθώς περνάνε οι μικροσκοπικοί μαγνήτες της ροδέλας από δίπλα τους, παρουσιάζεται το εξής φαινόμενο. Κάθε φορά που περνά ο μικροσκοπικός μαγνήτης μπροστά από το Reed Senor, η τάση πιάνει μια μέγιστη τιμή (κλειστό κύκλωμα), ενώ όταν απομακρύνεται, το κύκλωμα ανοίγει και η τάση απότομα μηδενίζεται. Το φαινόμενο αυτό επαναλαμβάνεται κάθε φορά που περνά ένας μικροσκοπικός μαγνήτης από την περιοχή του Reed Sensor.
Με δεδομένο ότι οι αποστάσεις των μαγνητών πάνω στη ροδέλα είναι ίσες και ότι η τάση στα άκρα του Reed Sensor είναι συνεχώς σταθερή, δημιουργείται ένας τετραγωνικός παλμός, του οποίου το πλάτος καθορίζεται από την τάση που εφαρμόζεται στα άκρα της μαγνητικής επαφής, ενώ η περίοδός του εξαρτάται από το πλήθος των μικρών μαγνητικών τμημάτων που βρίσκονται πάνω στη ροδέλα.
Η μαγνητική επαφή συνδέεται άμεσα με το positioner, μέσω δισύρματης γραμμής. Όσο μεγαλύτερο είναι το πλήθος των μαγνητών, τόσο ακριβέστερα μπορεί να γίνει αντιληπτή από το positioner η εκάστοτε θέση του μοτέρ (και κατ’ επέκταση, η θέση του κατόπτρου).
Πέρα από την κίνηση της μαγνητικής ροδέλας, έχουμε και την ταυτόχρονη κίνηση δύο άλλων ροδελών, που μπορούν με μια συγκεκριμένη προεξοχή που παρουσιάζουν στην περίμετρό τους, να ελέγξουν δύο διακόπτες (κατά την κίνηση προς τη μία ή την άλλη κατεύθυνση). Οι διακόπτες παίζουν το ρόλο του μηχανικού ορίου, έτσι ώστε εάν ανοίξει κάποιος από αυτούς, να διακόπτεται η παροχή των 36V προς το μοτέρ, άρα και η συνολικότερη κίνησή του.
Η τοποθέτηση μηχανικού ορίου σε μοτέρ τύπου actuator είναι πολύ σημαντική, γιατί αποφεύγεται η προσπάθεια κίνησής του, όταν σπειρωματικά είναι αδύνατο να συμπτυχθεί ή εκτονωθεί (άρα δεν ζορίζεται). Επίσης, κατά την εκτόνωση είναι πιο πιθανό να εξαντληθεί πρώτα το μηχανικό όριο κίνησης της πολικής βάσης (polar mount), με προφανές αποτέλεσμα τη στρέβλωση μέρους της ή πιθανή καταπόνηση της επιφάνειας του κατόπτρου.
Η αρχή λειτουργίας του positioner
Η αρχή λειτουργίας του, βασίζεται στην ύπαρξη ενός μικροεπεξεργαστή που λειτουργεί συνεχόμενα, ακόμα και σε κατάσταση αναμονής της συσκευής. Όλες οι ρυθμίσεις που δέχεται η συσκευή, όπως ρύθμιση ορίων, αποθήκευση θέσεων δορυφόρων κ.ά., αποθηκεύονται σε μία EPROM που επικοινωνεί απευθείας με το μικροεπεξεργαστή.
Στην εκδοχή όπου το positioner υποστηρίζει κίνηση με DiSEqC 1.2, τότε έχουμε αυτόματη κίνηση του μοτέρ σε δορυφόρο, που αντιστοιχεί το κανάλι το οποίο επιλέγουμε στο δορυφορικό μας δέκτη. Αυτό πρακτικά σημαίνει πως εκτός από την πληροφορία για την πόλωση του LNB, ο δέκτης στέλνει και μια άλλη πληροφορία που σχετίζεται με την κίνηση, βασισμένη στο πρωτόκολλο DiSΕqC 1.2, μέσω ενός διαμορφωμένου τόνου 22kHz.
Ο μικροεπεξεργαστής αναλαμβάνει να διαβάσει την εκάστοτε εντολή DiSEqC και βάσει της πληροφορίας που περιέχει, να δώσει εντολή σε αντίστοιχα κυκλώματα του positioner, που έχουν άμεση σχέση με την κατεύθυνση κίνησης του μοτέρ, καθώς και με τη θέση ηρεμίας.
To φέρον των 22kHz συνήθως έρχεται με χαμηλότερη στάθμη από αυτή που απαιτεί η αντίστοιχη βαθμίδα εισόδου CMOS ή TTL του μικροεπεξεργαστή, γι’ αυτό και υπάρχει ανάλογη ενισχυτική βαθμίδα. Για ευνόητους λόγους, η βαθμίδα εισόδου είναι χαμηλής ευαισθησίας για να μη διεγείρεται από σήματα θορύβου ή αλληλεπιδράσεων, ενώ η ελάχιστη στάθμη διέγερσης είναι περίπου 300mV.
Η δομή των εντολών DiSEqC έχει αναλυθεί σε προηγούμενο άρθρο του περιοδικού. Απλά, θα σας υπενθυμίσουμε ότι οι εντολές DiSEqC δημιουργούνται με την εισαγωγή χρονικών παύσεων στον τόνο των 22kHz που στέλνει ο δορυφορικός δέκτης προς το κεραιοσύστημά μας, μέσω του ομοαξονικού καλωδίου. Οι χρονικές παύσεις (100ms και 500ms) δημιουργούν bits δεδομένων (0 και 1), ενώ αυτά με τη σειρά τους δημιουργούν adress bytes, command bytes και frame bytes.
Συνδυασμοί των παραπάνω bytes αντιστοιχούν σε εντολές κίνησης, παύσης ,δημιουργίας ορίου κ.λπ.
Μετά την ανάγνωση συγκεκριμένης σειράς bytes, ο μικροεπεξεργαστής δίνει εντολή για την εφαρμογή κατάλληλης τάσης 36V στους ακροδέκτες με την ένδειξη motor, που θα επιτρέψει την κίνηση του μοτέρ (αφού γίνει η σύνδεση με αυτό. μέσω ειδικού καλωδίου).
Ο χρόνος κατά τη διάρκεια του οποίου θα εφαρμόζεται η τάση, έχει άμεση σχέση με το τι εντολή δώσαμε (π.χ. κίνηση για συγκεκριμένη θέση δορυφόρου) και καθορίζεται με την εισαγωγή τετραγωνικού παλμού σε αντίστοιχο pin του επεξεργαστή.
Η κατεύθυνση της κίνησης του μοτέρ καθορίζεται από την πολικότητα της τάσης των 36V, που εφαρμόζεται στους δύο ακροδέκτες. Κάθε ακροδέκτης συνδέεται με την έξοδο ενός ρελέ, ενώ το πρωτεύον πηνίο του ρελέ οδηγείται από ένα τρανζίστορ. Κάθε τρανζίστορ ελέγχεται απευθείας από τον επεξεργαστή και παίζει το ρόλο του διακόπτη. Όταν άγει το ένα τρανζίστορ, το άλλο δεν άγει.
Πάντα βρίσκονται σε αντίστροφη κατάσταση, με αποτέλεσμα κάθε φορά το ένα ρελέ είναι ανοιχτό και το άλλο κλειστό, όποτε η τάση των 36V αλλάζει πολικότητα.
Η πληροφορία της κίνησης του μοτέρ σε συγκεκριμένη θέση (άρα και του χρόνου κίνησης) έρχεται στο positioner από το actuator, με τη μορφή παλμών επιστροφής που δημιουργούνται από το Reed Sensor. H δημιουργία τους έχει αναλυθεί στο μέρος που αφορά το actuator. Οι παλμοί επιστρέφουν από το actuator μέσω των ακροδεκτών που αναγράφουν sensor και οδηγούνται μέσω κάποιων βαθμίδων (χαμηλοπερατό φίλτρο, buffer) στο μικροεπεξεργαστή. Η εκάστοτε θέση του κάτοπτρου είναι αποθηκευμένη σε μία μνήμη, σαν μία απόλυτη αριθμητική τιμή, από το 0 έως το 999. Ανάλογα με την κατεύθυνση της κίνησης, η αριθμητική τιμή αυξάνεται ή μειώνεται κατά μία μονάδα, για κάθε παλμό που επιστρέφει προς τον επεξεργαστή.
Πιθανές βλάβες – Αντιμετώπιση προβλημάτων
Σε περίπτωση απουσίας του παλμού επιστροφής, έχουμε στιγμιαία εφαρμογή της τάσης των 36V και όχι συνεχόμενη, με τη συνοδεία ένδειξης λάθους (error) στην οθόνη του positioner. Αυτό προκαλεί βηματική κίνηση κατά μονάδα και όχι συνεχόμενη.
Απώλεια του παλμού μπορεί να προκληθεί από τη μη σωστή λειτουργία της μαγνητικής επαφής στο μοτέρ ή από τη μη σωστή ένωση των καλωδίων που αντιστοιχούν στην ένδειξη sensor. Η μαγνητική επαφή (Reed Sensor) συνήθως καίγεται, εάν κατά λάθος εφαρμόσουμε στα άκρα της την τάση που προορίζεται για την κίνηση του μοτέρ (εάν δηλαδή τα 36V εφαρμοστούν στις επαφές sensor και όχι motor). Ένας απλός τρόπος για να ελέγξετε αν δουλεύει σωστά, είναι να τοποθετήσετε δίπλα της ένα μαγνήτη, ενώ ταυτόχρονα να μετρήσετε ωμικά τα άκρα της με ένα πολύμετρο. Εάν κατά την τοποθέτηση του μαγνήτη μετράτε βραχυκύκλωμα, τότε η επαφή εργάζεται σωστά. Εάν όχι, την αντικαθιστάτε.
Δυστυχώς, δεν διατίθενται Reede Sensors στο εμπόριο, με αποτέλεσμα αν καταστραφεί να πρέπει να αλλάξετε όλο το actuator. Αν όμως υπάρχει άμεση ανάγκη μετακίνησης του κατόπτρου σε ένα δορυφόρο της προτίμησής σας, μπορείτε να την κάνετε δημιουργώντας τεχνητούς παλμούς επιστροφής. Αυτή είναι μια χρήσιμη πατέντα, που επιτυγχάνεται όταν βραχυκυκλώνετε στιγμιαία και όσο πιο περιοδικά μπορείτε, τα άκρα sensor του positioner, ενώ ταυτόχρονα δίνετε εντολή στο positioner για κίνηση ανατολικά ή δυτικά. Συνδέστε δύο καλωδιάκια στις επαφές sensor και φέρτε τα συνεχόμενα σε στιγμιαία επαφή (βραχυκυκλώστε τα), σε όσο πιο σταθερά χρονικά διαστήματα μπορείτε.
Μην περιμένετε ακρίβεια στο μέτρημα της κίνησης, απλά αυτό θα σας γλιτώσει από την πλήρη ακινητοποίηση του μοτέρ, σε περίπτωση βλάβης της επαφής.
Εντελώς εγκυκλοπαιδικά, θα θέλαμε να αναφέρουμε πως, χρησιμοποιώντας ένα παλαιού τύπου positioner χωρίς μνήμες (δηλαδή μόνο με δύο καλώδια για την τάση των 36V) θα μπορούσατε πάλι να μετακινήσετε προσωρινά το κάτοπτρο.
Μια άλλη περίπτωση ακινητοποίησης χωρίς να έχει πρόβλημα η επαφή, μπορεί να συναντήσετε σε νέα εγκατάσταση, εάν το μοτέρ βρίσκεται στη γραμμικά ελάχιστη θέση (εντελώς κλειστό) και δεν εκτονώνεται, ενώ δίνετε εντολή για κίνηση. Αυτό οφείλεται στο ότι ναι μεν εφαρμόζεται τάση 36V προς το μοτέρ, αλλά πριν εφαρμοστεί στα άκρα του, διακόπτεται από το αντίθετο μηχανικό όριο του ενός εκ των δύο διακοπτών. Εδώ η λύση είναι απλή, αρκεί να αντιστρέψουμε τα καλώδια στα άκρα του positioner με την ένδειξη motor, έτσι ώστε να μην επηρεάζει την κίνησή μας ο λάθος (αντίθετος) μηχανικός διακόπτης, αλλά ο σωστός κατά το τέλος της εκτόνωσης.
Επίσης, μπορεί κάποια στιγμή να ανακαλύψετε το εξής παράδοξο, κυρίως μετά την πρώτη εγκατάσταση. Να δίνετε εντολή για κίνηση προς τα ανατολικά, μέσω του μενού κίνησης του δέκτη, ενώ το κάτοπτρο να κινείται προς τα δυτικά. Αυτό σημαίνει ότι έχετε τοποθετήσει ανάποδα τα καλώδια της τάσης του μοτέρ. Απλά, τα αντιστρέφετε (στη θέση μότο), οπότε πλέον η κίνηση θα συμβαδίζει και στην κυριολεξία με την εντολή που δίνετε με το τηλεχειριστήριό σας.